Lineaarinen malli
| Kuva 1 |
|---|
 |
Ehkä yksinkertaisimmassa matemaattisessa mallissa kaksi muuttujaa ovat suoraan verrannolliset. Tällöin muuttujien suhde (osamäärä) pysyy koko ajan samana ja koordinaatistoon sijoitettuna muuttujien arvot osuvat origon kautta kulkevalle suoralle.
Suoran kulmakerroin antaa tällöin muuttujien suhteen ja suoran yhtälö on muotoa \(y=kx\), jossa \(k\) on suoran kulmakerroin. Funktiomuodossa vastaava on \(f(x)=kx\), jonka kuvaaja \(y=kx\) saadaan merkitsemällä \(y=f(x)\).
Malli voi olla lineaarinen, vaikka muuttujat eivät olekaan suoraan verrannollisia. Tällöin muuttujat eivät ole yhtä aikaa nollia, jolloin arvoja vastaava suora ei kulje origon kautta. Tätä vastaava funktio on \(f(x)=kx+b\), jonka kuvaaja on suora \(y=kx+b\). Vakiotermi \(b\) aiheuttaa sen, että suora ei kulje origon kautta, ellei \(b\) ole nolla.
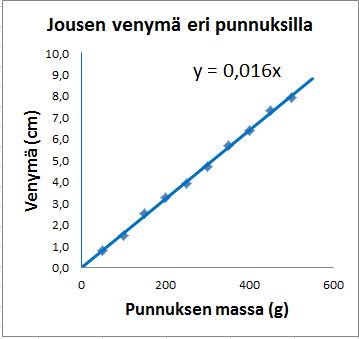
Esimerkki (ks. kuva 1)
Fysiikan tunnilla mitattiin jousen venymää erilaisilla punnuksilla. Tulokset sijoitettiin koordinaatistoon ja pisteiden kautta sovitettiin suora, jonka yhtälöksi saatiin \(y=0,016x\), jossa \(y\) viittaa venymään ja \(x\) punnuksen massaan. Mikä on venymä, jos punnuksen massa on \(6000 \:\text{g}\) (olettaen, että tilanne pysyy lineaarisena)?
Ratkaisu: Venymä saadaan suoraan yhtälöstä \(y=0,016x\) sijoittamalla muuttujan \(x\) paikalle luku \(6000\):
\begin{equation} y=0,016x=0,016 \cdot 6000=96\end{equation}Ratkaisu: Venymä olisi tällöin noin \(96 \:\text{cm}\).
